FPV ДРОНИ
Комерційна пропозиція від виробника

FPV 10''
Котушка оптична
FPV 13''
Котушка оптична 20 км


FPV 15''
Котушка оптична
ПАЙКА ДО ДРОНУ
Інструкція по налаштуванні управління та відео на оптоволоконному зв'язку по протоколу керування SBUS при використанні наземного блоку від Skelia Systems.
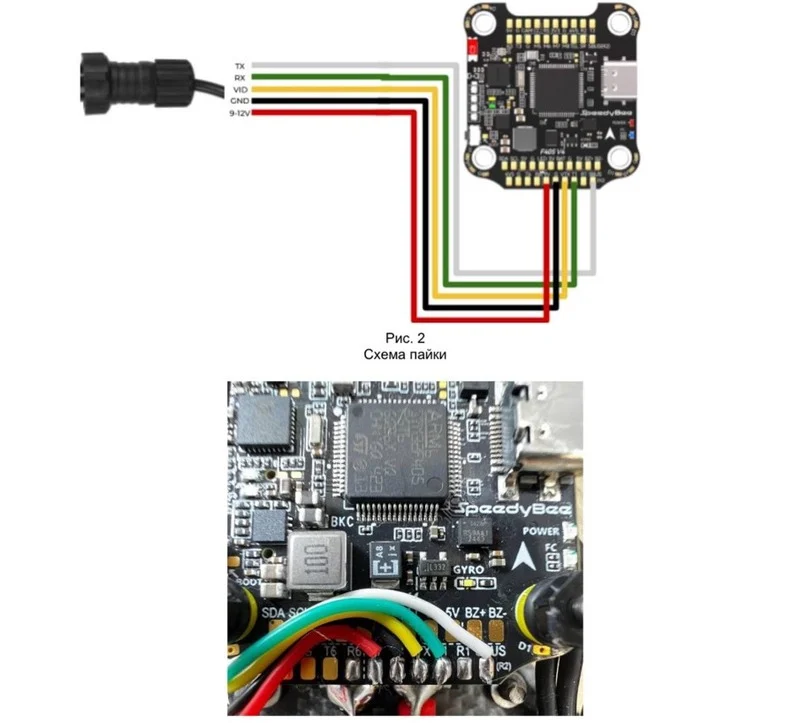
Схема підключення проводів:
Важливі примітки:
- •Приклад наведено на основі польотного контроллера SpeedyBee F405 V4.
- •RX та TX слід паяти по звичній UART схемі (RX-TX, TX-RX).
- •На політнику SpeedyBee керування (TX) слід паяти до площадки SBUS.
- •При використанні протоколу SBUS зелений провід не використовується.
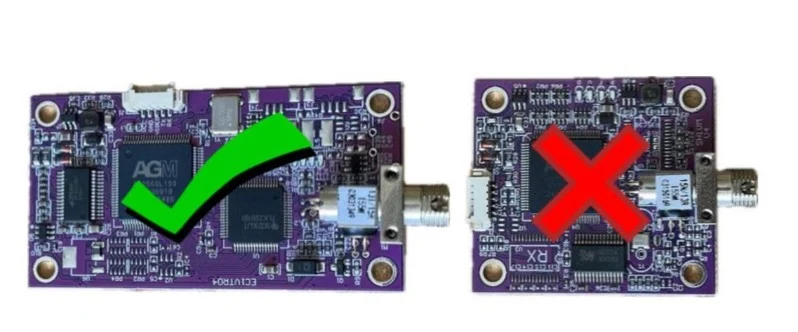
У наземному блоці використовується прямокутний медіаконвертер. Ми використовуємо прямокутну плату (показано зліва ✓).
НАЛАШТУВАННЯ BETAFLIGHT
Покрокова інструкція по налаштуванню польотного контролера в Betaflight Configurator
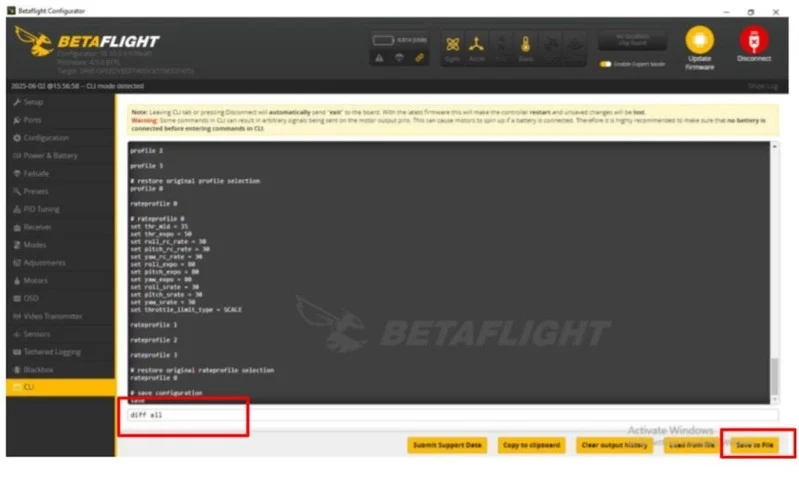
Бекап налаштувань
Робимо бекап налаштувань на дроні через команду diff all в CLI
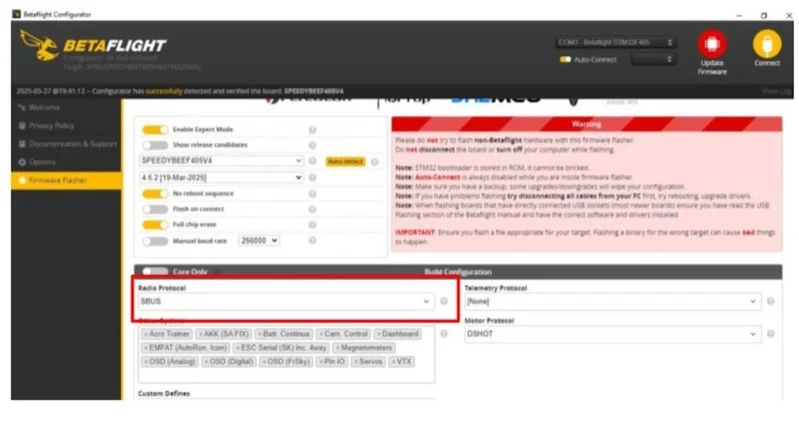
Вибір протоколу SBUS
Прошиваємо політний контролер на потрібну версію та у налаштуваннях вибираємо Radio Protocol: SBUS
Налаштування портів
Вибираємо UART2 в налаштуваннях портів та вмикаємо Serial RX. Після прошивки дрона відновлюємо його налаштування в CLI.
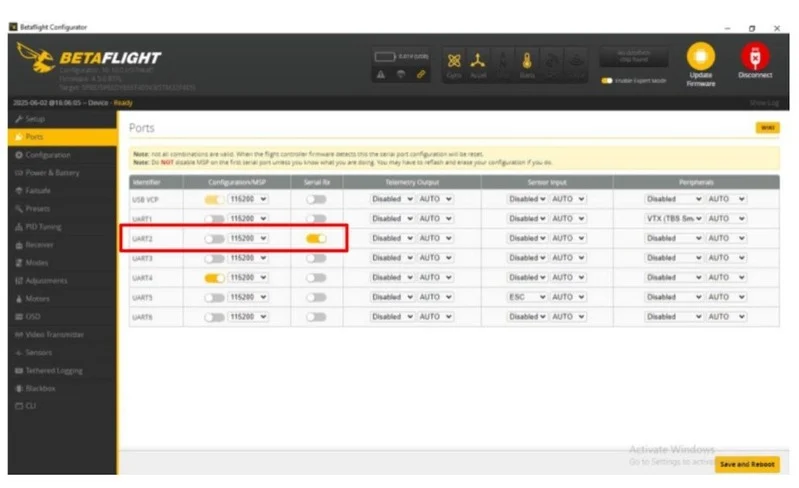
Важливо! На деяких політних контроллерах прошивка не є обов'язковою. Дана дія потрібна на політнику SpeedyBee.
НАЛАШТУВАННЯ ПУЛЬТА КЕРУВАННЯ
Інструкція по налаштуванню пульта RadioMaster TX12 для роботи з оптоволоконною системою

Підключення модуля
Підключаємо модуль в JR-BAY слот зі зворотної сторони пульта.
Перехід до налаштувань
Тиснимо Page та переходимо вниз до налаштувань External RF.
Вибір протоколу SBUS
У секторі External RF вибираємо SBUS як протокол передачі.
З'ЄДНАННЯ ВСІЄЇ СИСТЕМИ В ЄДИНЕ ЦІЛЕ

Підключаємо дрона до виносного кабелю, оптичний конектор від виносу протягуємо до наземного блоку, далі до наземного блоку підключаємо відео системи та пульт керування.
Після того, коли все з'єднано вмикаємо дрон та наземний блок і перевіряємо наявність відео сигналу та керування.